

Квадрокоптер взлетел из-под воды и присосался к зданию
Lei Li et al. / Science Robotics, 2022
Инженеры из Китая, Великобритании и Швейцарии разработали двусредный квадрокоптер с присоской, повторяющей орган рыбы-прилипалы. Дрон может летать в воздухе, плавать под водой и присасываться к предметам в этих двух средах, причем даже если их поверхность изогнута или движется. Статья опубликована в Science Robotics.
Рыбы семейства прилипаловых, в том числе обыкновенный прилипало (Echeneis naucrates), обладают необычной способностью прилипать к более крупным рыбам, в том числе акулам и дельфинам, а также морским черепахам. Это позволяет им экономить энергию при передвижении и питаться остатками пищи или паразитами на теле рыбы-хозяина. За прилипание у них отвечает передний спинной плавник, который в процессе эволюции преобразовался в присоску. Она состоит из открытой камеры и небольших пластинок (ламелл). При контакте с телом другой рыбы ламеллы выдвигаются и создают внутри камеры пониженное давление, удерживающее прилипалу, причем его хватает даже при сильных движениях хозяина — например, когда дельфин выпрыгивает из воды:
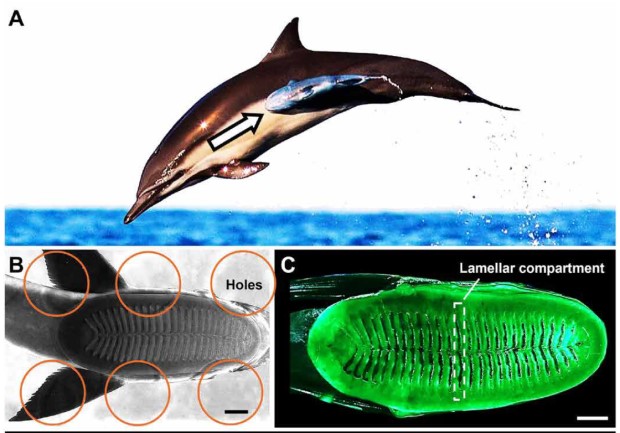
Рыба-прилипала на дельфине (A), демонстрация возможностей рыбы прилипать даже при неполном контакте (B) и фотография присоски обыкновенного прилипало (Echeneis naucrates)
Lei Li et al. / Science Robotics, 2022
В 2017 году инженеры повторили строение этого органа в роботе-прилипале и показали, как он способен присасываться к поверхностям под водой. В новой работе эта же группа инженеров под руководством Ли Вэня (Li Wen) из Бэйханского университета улучшила искусственный аналог присоски рыбы-прилипалы и оснастила им дрон, работающий как в воздухе, так и в воде.
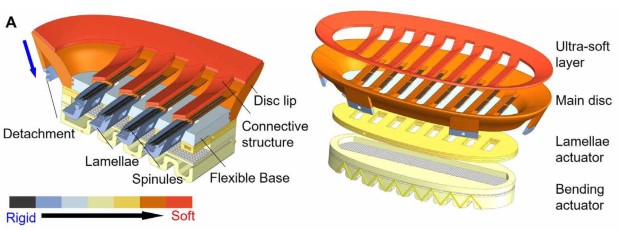
Структура присоски
Lei Li et al. / Science Robotics, 2022
В целом механизм работы присоски такой же, как у рыбы и предыдущего искусственного аналога: ламеллы прислоняются к поверхности, давят на нее и тем самым создают пониженное давление. Но к этому основному механизму инженеры добавили еще два. Во-первых, для контакта с изогнутыми поверхностями у присоски есть второй актуатор, который изгибает присоску. Для него и для основного актуатора в дроне используется по одному электромотору с поршнем. Они закачивают в актуаторы жидкость и приводят их в движение:
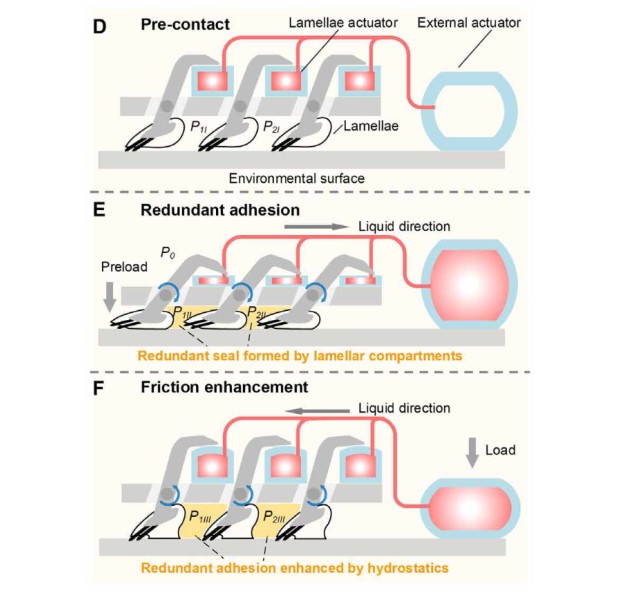
Механизм прилипания за счет создания низкого давления в камере
Lei Li et al. / Science Robotics, 2022
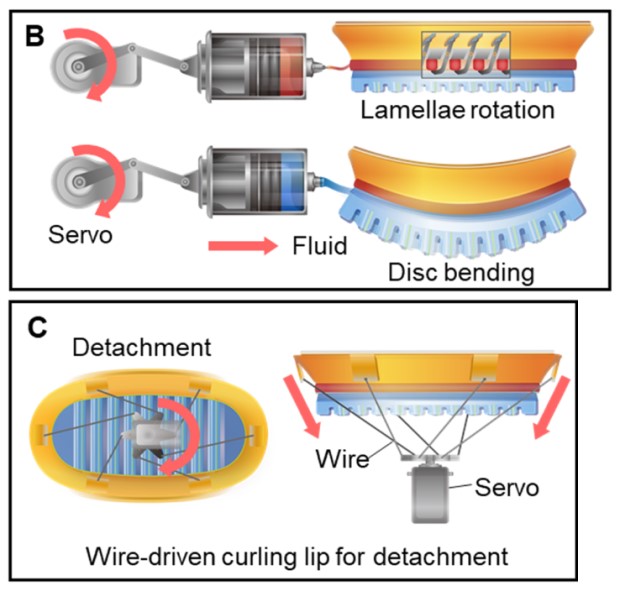
Механизмы присасывания и отсоединения
Lei Li et al. / Science Robotics, 2022
Во-вторых, инженеры добавили к присоске еще один мотор с шестью тросами. При его активации тросы скручивают мягкую верхнюю часть присоски и позволяют быстро отсоединить дрон от поверхности.
Инженеры установили присоску на квадрокоптер: в основном они испытывали его присоской вверх, но также показали, что если установить ее снизу, то дрон может захватывать и перемещать предметы. Квадрокоптер имеет обычную конструкцию, но оснащен винтами, оптимизированными для работы в двух средах. У каждого винта по три лопасти, которые складываются при вращении в воде и раскладываются, когда дрон поднимается из воды и попадает в менее плотную среду. Эксперименты показали, что такая конструкция снижает время перехода из воды в воздух на 27,3 процента.
Разработчики продемонстрировали возможности дрона по работе в двух средах. В частности, они показали, как он летает в воздухе, плавает в воде, перемещается между двумя средами в обоих направлениях. Также они продемонстрировали, как дрон может быстро присасываться к ровным и изогнутым поверхностям в воде и воздухе, причем он продолжает висеть, даже если присосался к подвижному роботу, что позволяет экономить энергию подобно рыбам-прилипалам. Испытания показали, что по сравнению с зависанием на месте прилипание снижает затраты энергии в 51,7 раза в воздухе и в 19,2 раза в воде.
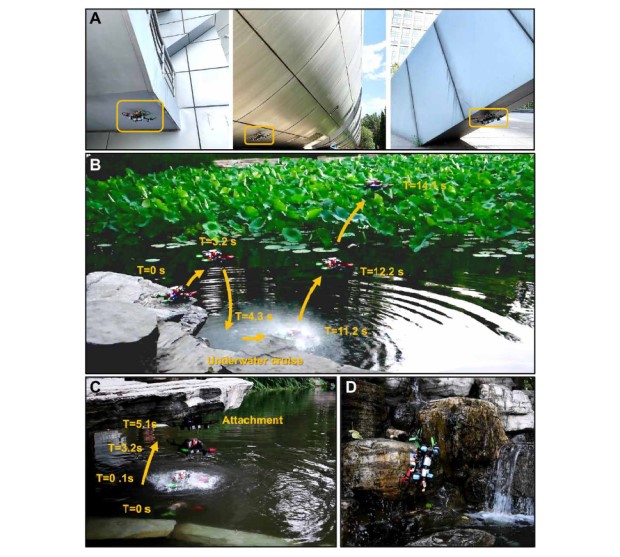
Демонстрация возможностей дрона
Lei Li et al. / Science Robotics, 2022
Есть и другие двухсредные квадрокоптеры, некоторые из которых способны проводить под водой месяцами. А есть и гибридный подход, при котором дрон садится на воду и выпускает отдельного подводного робота. Мы рассказывали про одну из таких систем, разработанную группой, которую возглавляет один из авторов новой работы Мирко Ковач (Mirko Kovac).



